Hello,
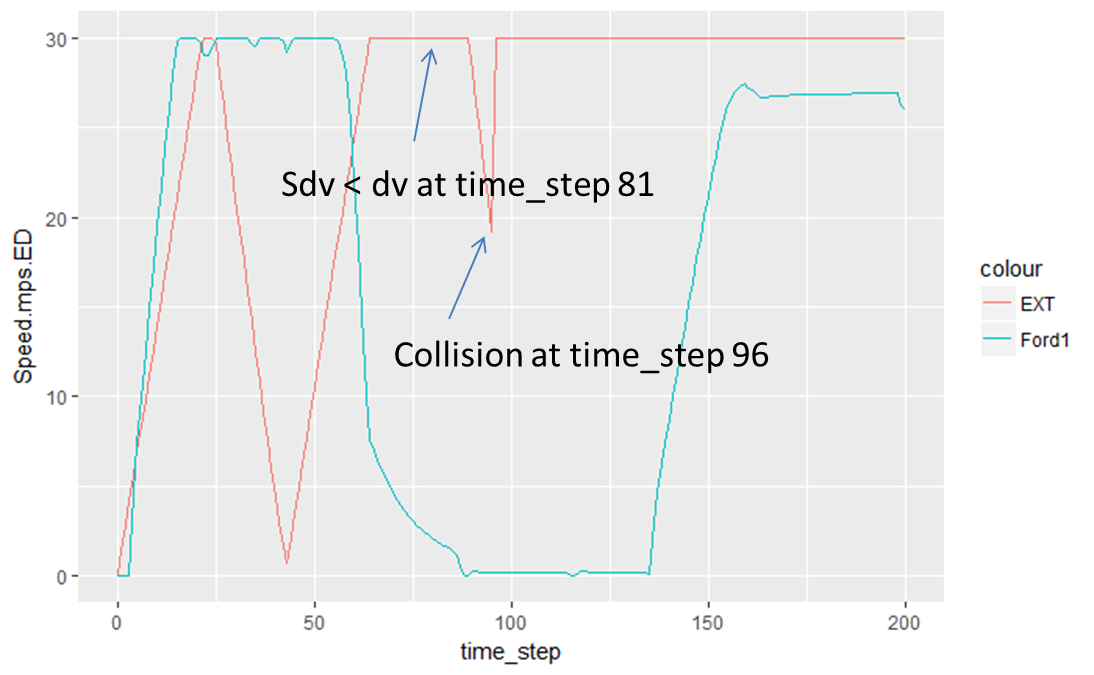
It would be best if you could provide your scenario, as its hard to get the exact numbers from your plot and dx is missing anyway
(or at least give the exact values of v, vLeader, and gap in step 81).
When trying to replicate this I can see situations where dv > sdv and the vehicle does not decelerate due to the additionial condition of dx < D_MAX. Otherwise, the vehicle brakes as expected.
Also, the usage of 'decel' and 'emergencyDecel' in our implementation of the Wiedemann model is somewhat complicated.
In sumo the decel parameter (in 2011 when this model was implemented) was used to represent two things at the same time:
- (1) comfortable decelaration
- (2) maximum deceleration which should never be exceeded
- the value of bx which controls braking in the approaching regime is based on the 'security' parameter not on decel
- the braking value for the emergency regime was taken from decel with the idea that it represents maximum deceleration.
- the results for acceleration in the approaching regime were also limited to decel, again with the idea that it represents maximum deceleration. The original Wiedemann model has no such limitation!
Obviously, this gives bad results when you set a low value for decel under the assumption that int controls braking in the approaching regime.
In the meantime we have introduced the new parameter emergency deceleration which seperates the two concepts (1) and (2). Therefore as of yesterday, the 'decel' value isn used anymore by the Wiedemann model for car-following. The 'decel' value is still used in a different formula when the vehicle is supposed to stop at an exact position (something which the original model does not deal with).