[
Date Prev][
Date Next][
Thread Prev][
Thread Next][
Date Index][
Thread Index]
[
List Home]
|
[sumo-user] lane changing and apparent stick to right lane, also when quite high density
|
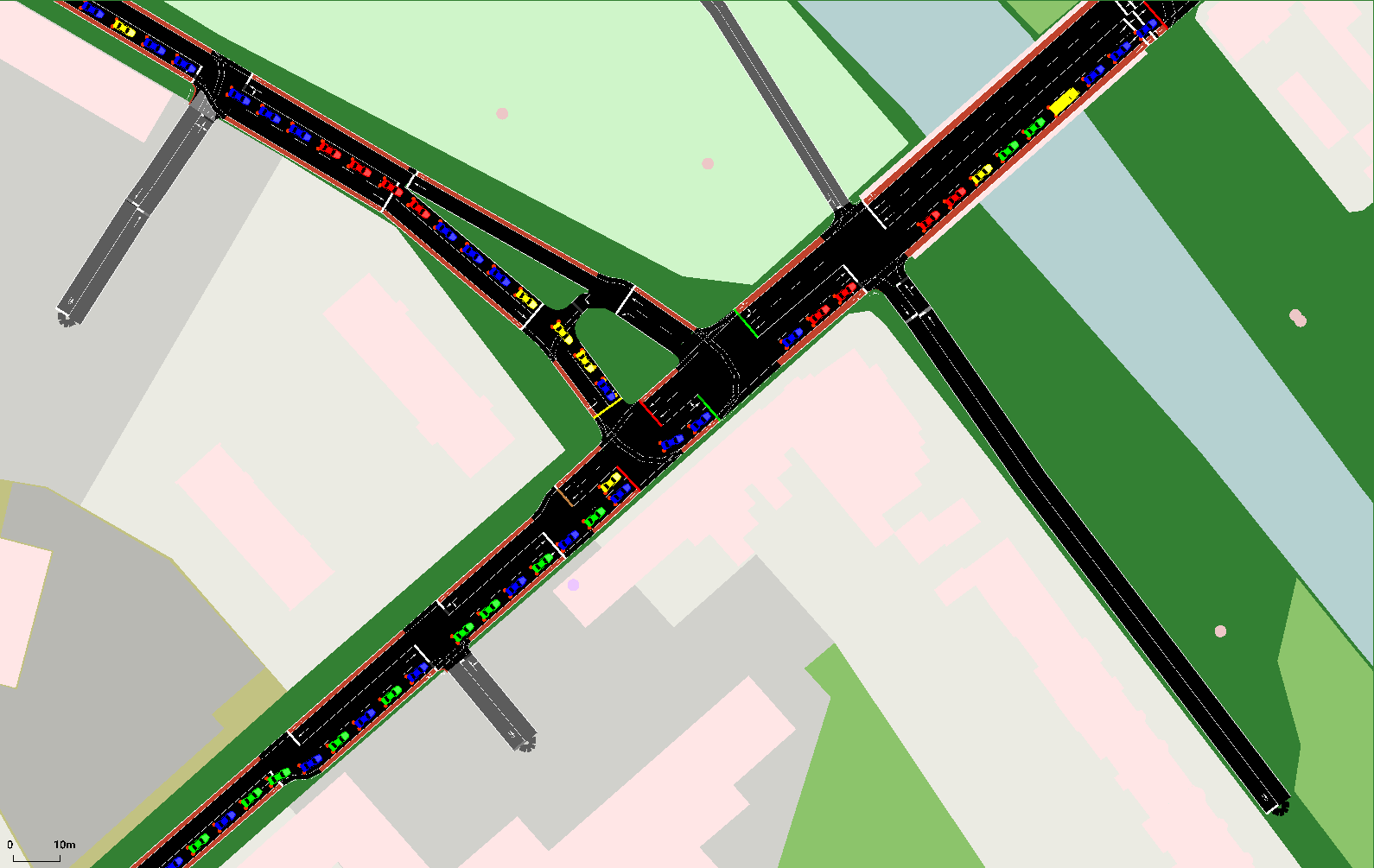
In several places I obey a behaviour where (upon going from one to two lanes) the right lane is still targeted, also when it is full, while the left lane is quite empty. According to the attached screenshot sample.png this even applies to the traffic coming from northwest (in the middle).
I have ensured that both lanes have correct straightforward assignments on every lane (as well as correct connection from the widening point, as well as the vehicles coming from northwest, who have connections to both lanes toward northeast.
Upon further examination, it looks far better when traffic also is willing to take the route to nortwest. But also when both lanes are only moderately full, the 1 to 2 lanes distrtibute quite evenly, also when only a few vehicles want to northwest.
It seems that the obeyed right "tendency" occurs even more when the right lane is densely occupied - which would inherently worsen the situation.
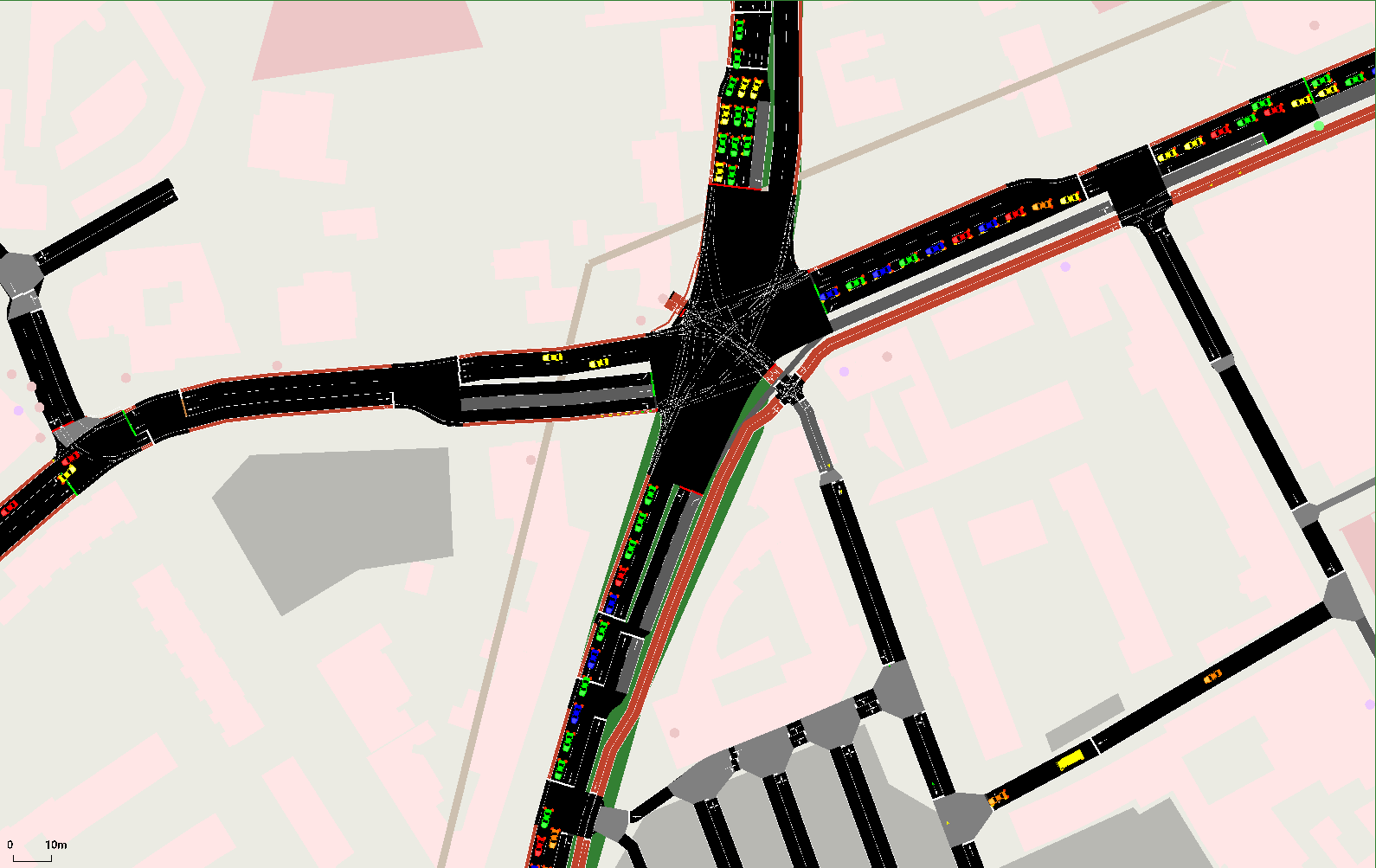
Another example is sample1.png.
The traffic coming from east is no longer able to occpupy the most left lane of two that allow a parallel flow to the south - because of the tendency to occupy the right lane (here: lane #3). Lane #4 is quite empty because of obstruction. As long as the *flow* is present, vehicles changes quite reqularly from lane #3 to lane #4 (as above: more evenly distribution). But when lane #1 on the south edge is occupied, effectively a deadlock appears. But a part of its left lane (#2) is not occupied. One can see it also the other way round:
As a consequence, lane #2 of the edge towards the south is empty as well (and the throughput is reduced), because the leftmoste lane from the source edge is empty. The two connections accross the junction do - intentionally - not allow lane change during crossing.
I have the impression that my scenario (unidirectional city ring with two lanes) tends to have a very steep "curve" of traffic density vs. "congestion factor", just because of behaviour as described above. Steeper than a scenario with bidirectional, partially single lanes.
Even in the presence of empty lanes I obey also rat-run traffic into a residential parallel street, when the left lane is free while the vehicle must (later on) move to the right lane because of getting into another street to the right.
I wonder if I can adjust (general) lane changing behaviour such that lane density is more equally distributed over both lanes, which would require less strict lane changing parameters (e.g. an lcAssertive higher than default). Or would the "Simple Continuous lane-change model" result in actually more lane changes?
Second question: Do several (simple) junctions along a street affect the lane changing behaviour because of the then shorter individual edges?
Rob
Attachment:
sample.png
Description: PNG image
Attachment:
sample1.png
Description: PNG image
{kind=link}
{kind=link}